






Động cơ điện xoay chiều (AC) sử dụng dòng điện đổi chiều theo chu kỳ . Một động cơ xoay chiều có hai phần điện cơ bản: một “stato” và một “rôto” như cho trong hình 7. Stato là bộ phận đứng yên và rôto là bộ phận quay, làm quay trục của động cơ điện.
Ưu điểm chính của động cơ một chiều so với động cơ xoay chiều là dễ điều khiển tốc độ hơn động c ơ xoay chi ều. Bù l ại, động cơ xoay chiề u có thể được lắ p thêm bộ điề u khi ển biến đổi tần số, tuy nhiên dù thiết bị này giúp cả i thiện việc điều khiển tốc độ nhưng chất lượ ng điện lại giảm. Động cơ cả m ứng (còn gọi là động cơ không đồng bộ hoặ c dị bộ) là động cơ phổ biến nhất trong công nghiệp vì sự chắc chắn và ít yêu cầ u về bảo trì hơn. Động cơ cảm ứng xoay chiều rẻ tiề n (chỉ bằng một nửa hoặc non nửa giá của động cơ một chiều cùng công suất) và có hệ số tỷ lệ công suất: trọng lượng cao (gấp đôi tỷ lệ công suất: trọng lượng của động cơ một chiều).
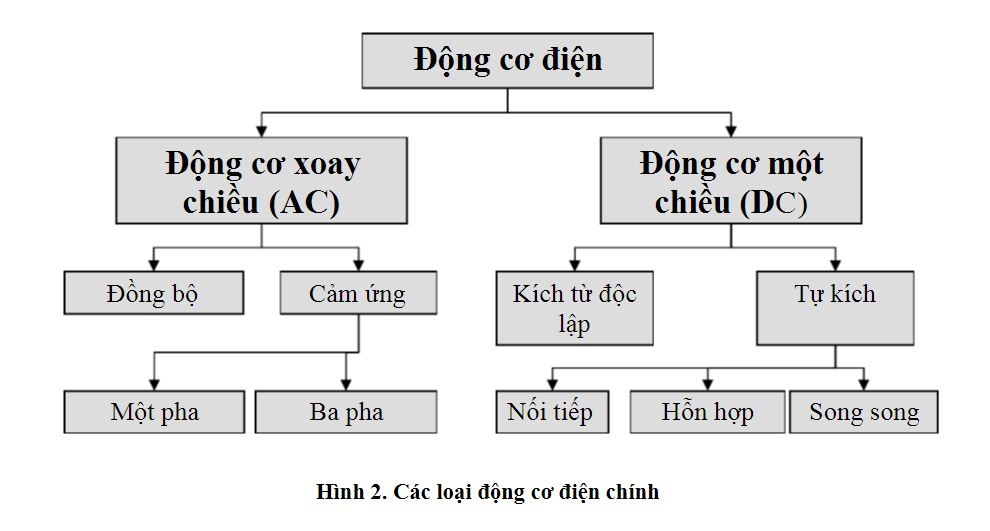
1. Động cơ điện đồng bộ
Động cơ điện đồng bộ là động cơ xoay chi ều, hoạt động ở tốc độ không đổi xác định bởi tần số của hệ thống. Động cơ loại này cần có dòng điện một chiề u (DC) để kích thích và có mô men khởi động thấp, vì vậy động cơ đồng bộ thích hợp với các thiết bị ứng dụng khởi động ở mức tải thấp như máy nén khí, tần số thay đổi hay máy phát điện. Động cơ đồng bộ có thể cải thiện hệ số công suấ t hệ thống, đây là lý do tại sao chúng thường hay được sử dụng với những hệ thống dùng nhiều điện.
(Integrated Publishing, 2003) Các thành phần chính của động cơ đồng bộ bao gồm:
Rôto. Sự khác nhau chủ yếu giữa động cơ đồng bộ và không đồng bộ là rôto của động cơ đồng bộ quay với tốc độ bằng tốc độ của từ trường quay. Được như vậy là vì từ trường của rôto không còn tính cảm. Rôto có thể được lắp các nam châm vĩnh cửu hoặc các dòng kích từ một chiều bị giới hạn ở một vị trí nhất định khi xung đối với từ trường khác.
Stato. Stato tạo ra từ trường quay tỷ lệ với tần số cung cấp.
Động cơ quay ở tốc độ đồng bộ, cho trong phương trình sau (Parekh, 2003):
Ns = 120 f / P
Trong đó:
f = tần số của tần số cung cấp P= số cực từ
2. Động cơ điện cảm ứng (không đồng bộ)
Động cơ không đồng bộ là động cơ rất thông dụng, được sử dụng cho các thiết bị khác nhau
trong công nghiệp. Sở dĩ loại động cơ này thông dụng như vậy là vì chúng có thiết kế đơn giản, rẻ tiền và dễ bảo trì, có thể nối trực tiếp với nguồn xoay chiều.
a. Các bộ phận của động cơ điện
Một động cơ không đồng bộ có hai bộ phận điện cơ bản
Rôto. Động cơ không đồng bộ sử dụng hai loại rôto:
– Rôto lồng sóc bao gồm những thanh dẫn dày đặt tại các rãnh song song. Đầu các thanh này được nối vào vòng đoản mạch.
– Một rôto quấn dây có ba pha, hai lớp, cuộn dây quấn. Rôto được quấn nhiều cực như là stato. Ba pha được nối dây bên trong và các đầu dây này được nối vào vành trượt treo trên một trục có các chổi than.
Stato. Stato được ghép từ các vòng dập định hình với các rãnh để chứa các cuộn dây ba pha. Chúng được quấn cho một số cực nhất định. Bố trí trong không gian của những cuộn dây này lệch nhau 120o.
Động cơ cảm ứng (Automated Buildings)
b. Phân loại động cơ điện không đồng bộ
Có thể phân động cơ điện không đồng bộ thành hai nhóm chính (Parekh, 2003):
Động cơ điện không đồng bộ một pha. Chỉ có một cuộn dây stato, hoạt động bằng nguồn điện một pha, có một rôto lồng sóc và cần một thiết bị để khởi động động cơ. Hiện nay, đây là loại động cơ phổ biến nhất sử dụng trong các thiết bị tại gia đình như quạt, máy giặt, máy sấy quần áo và có công suất trong khoảng 3 – 4 mã lực.
Động cơ điện không đồng bộ ba pha. Từ trường quay do nguồn cung ba pha cân bằng sinh ra. Những động cơ loại này có năng lực công suất cao hơn, có thể có rôto lồng sóc hoặc rôto dây quấn (khoảng 90% là có rôto lồng sóc), và tự khởi động. Ước tính khoảng 70% động cơ trong công nghiệp thuộc loại này, chúng được sử dụng trong máy bơm, máy nén, băng tải, lưới điện công suất cao và máy mài. Chúng thích hợp trong dải từ 1/3 tới hàng trăm mã lực.
c. Tốc độ của động cơ không đồng bộ
Động cơ không đồng bộ hoạ t động như sau. Điện được cấp vào stato sinh ra từ tr ường quay. Từ trường chuyển động với tốc độ đồng bộ quanh rôto, tạo ra dòng điện trong rôto. Dòng điện trong rôto tạo ra từ trường thứ hai, có xu hướng chống lại từ trường stato và làm rôto quay.
Tuy nhiên, trên thực t ế, động c ơ không bao gi ờ chạy với tốc độ đồng bộ mà thường chạy ở mức thấ p hơn “tốc độ cơ bản”. Sự chênh lệch giữa hai tốc độ này là “độ trượ t”, độ trượt sẽ tăng khi tải tăng. Độ trượ t chỉ xảy ra ở động c ơ không đồng bộ. Để tránh hiện tượng này, có thể lắ p vành trượt, những động c ơ loại này gọi là “động cơ có vành trượt”. Phần trăm độ trượt được tính bằng phương trình sau (Parekh, 2003):
% Độ trượt = Ns – Nb x 100
Ns
Trong đó:
Ns = tốc độ đồng bộ (tốc độ quay của từ trường) vòng/phút
Nb = tốc độ cơ của trục máy vòng/phút
d. Mối liên quan giữa tải, tốc độ và mô men quay
Hình minh hoạ đường cong tốc độ của mô men điển hình ở động cơ không đồng bộ xoay chiều ba pha với đòng điện cố định. Khi động cơ (Parekh, 2003):
Khởi động: có một dòng khởi động cao và mô men thấp (“mô men kéo”).
Đạt đến 80% tốc độ toàn phần, mô men đạt mức độ cao nhất (“mô men đẩy”) và dòng điện bắt đầu giảm.
Ở tốc độ toàn phần, hoặc tốc độ đồng bộ, mô men và dòng của stato giảm về 0.
Đường cong tốc độ-mômen quay của động cơ điện cảm ứng xoay chiều 3 pha (Parekh, 2003)


